About
My research focuses on end-to-end autonomous driving and trajectory prediction. Our model CTL-Drive ranks #15 on the Waymo E2E Driving Challenge — trained on a single RTX 4090. My broader work spans lane graph conditioning, LiDAR-camera fusion, and attention-based safety analysis, across Waymo, CARLA, and VISSIM environments.
Affiliation
Concordia University
Supervisor
Prof. Ciprian Alecsandru
Email
zhouxingnan2016@gmail.com
Location
Montreal, QC, Canada
Creative
nudilab.art
Publications
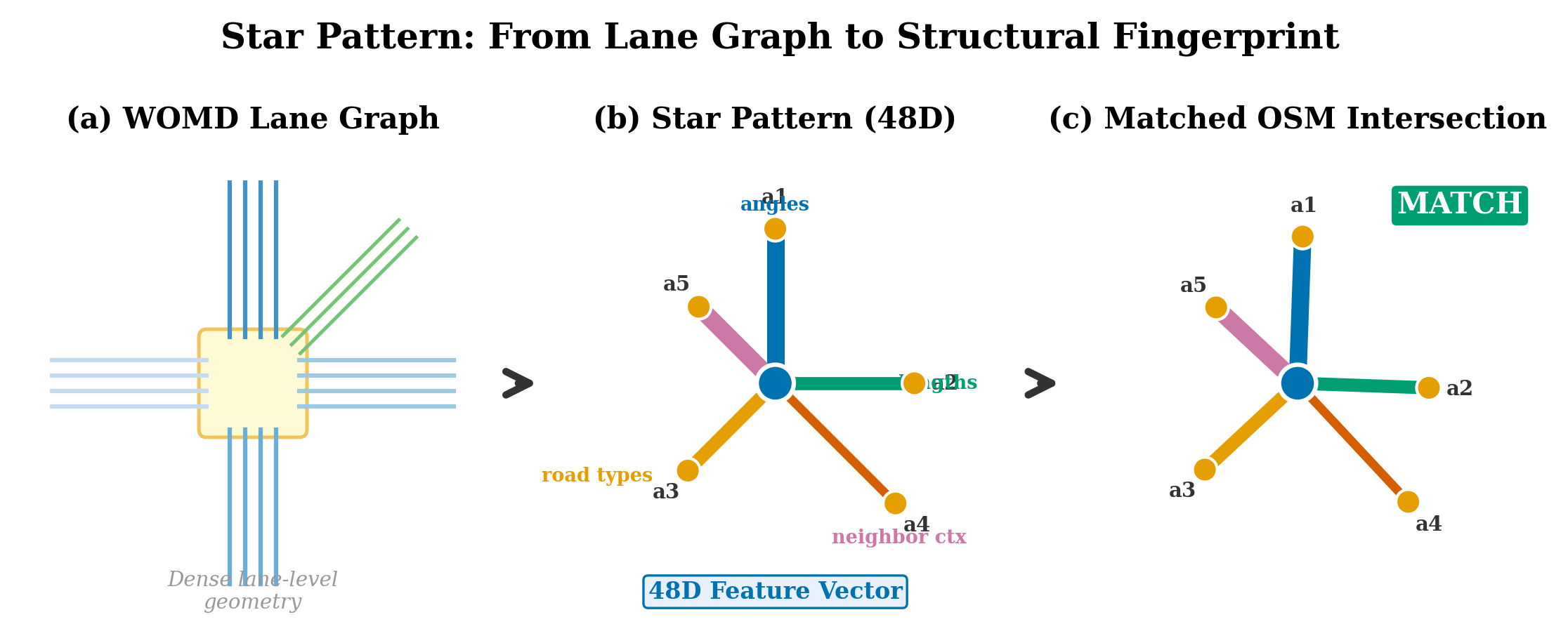
WayGraph: GPS-Free Localization of Autonomous Driving Scenarios onto OpenStreetMap In Preparation
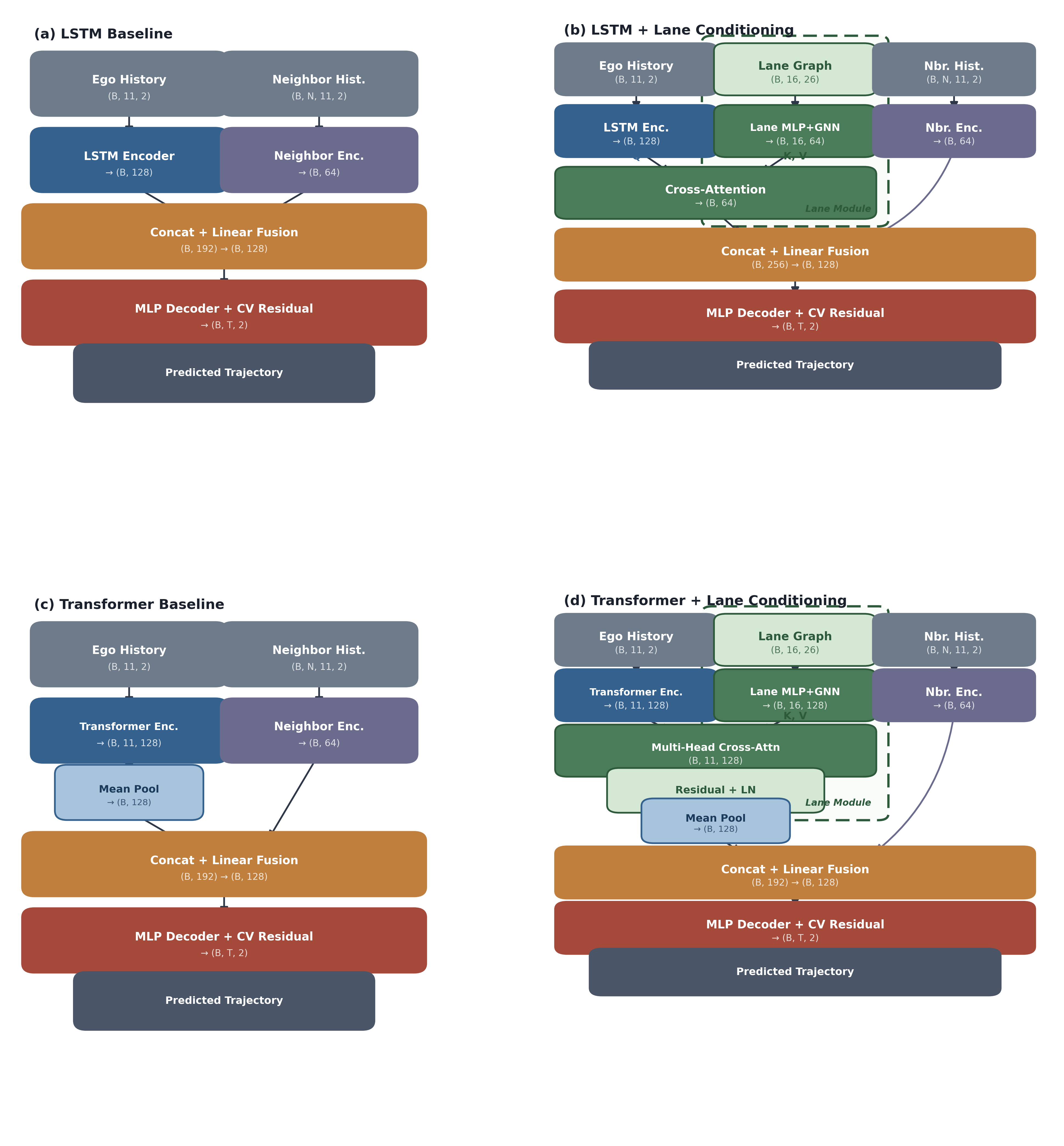
Local Lane Graph Conditioning as a General Inductive Bias for Trajectory Prediction: A Multi-Architecture Study on the Waymo Open Motion Dataset In Preparation
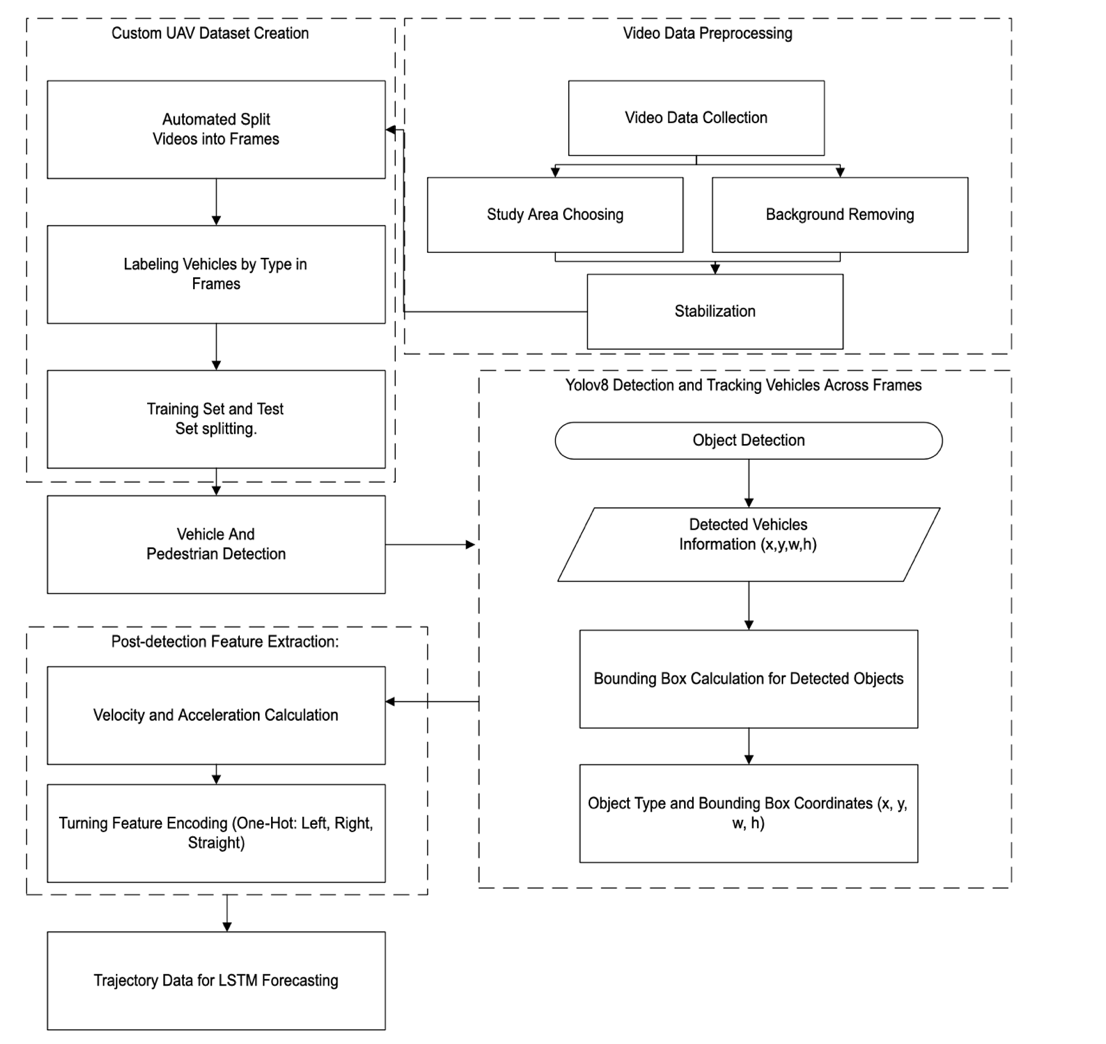
Turn-Aware LSTM Model for Vehicle Trajectory Forecasting Published
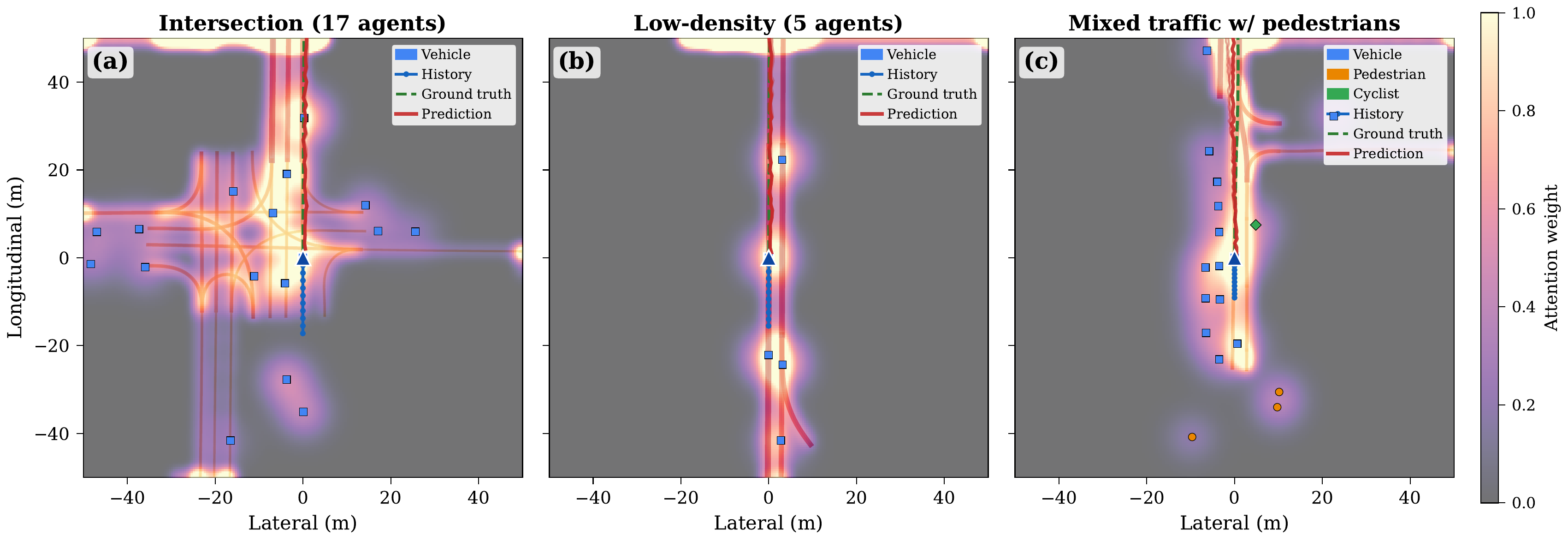
Spatial Attention Visualization for Interpretable Trajectory Prediction in Autonomous Driving: Discovering Safety Blind Spots Through Counterfactual Analysis In Preparation
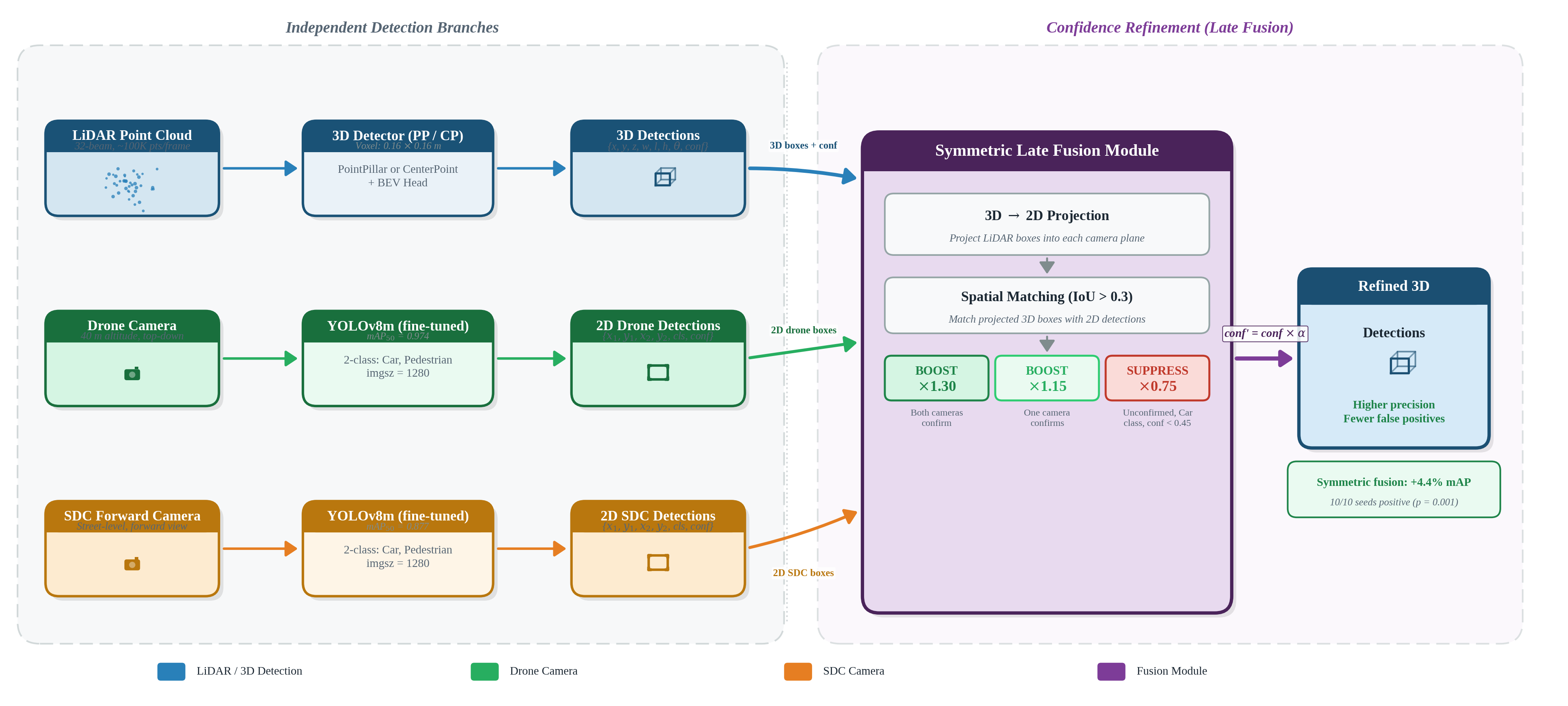
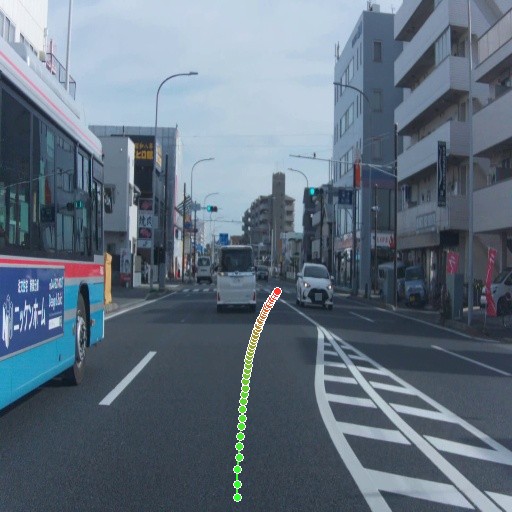
Dual-Camera LiDAR Fusion for Occlusion-Robust 3D Detection in Urban Driving Simulation In Preparation
CTL-Drive: VLM-Based End-to-End Driving on a Single GPU Ongoing
Research Highlights
Spanning trajectory prediction, 3D perception, and explainable AI — see individual project pages for details.