Abstract
Accurate trajectory prediction for autonomous driving requires understanding both motion dynamics and road structure. While recent learning-based approaches have shown promise, they often struggle to effectively incorporate structured road information, leading to physically implausible predictions that violate lane constraints.
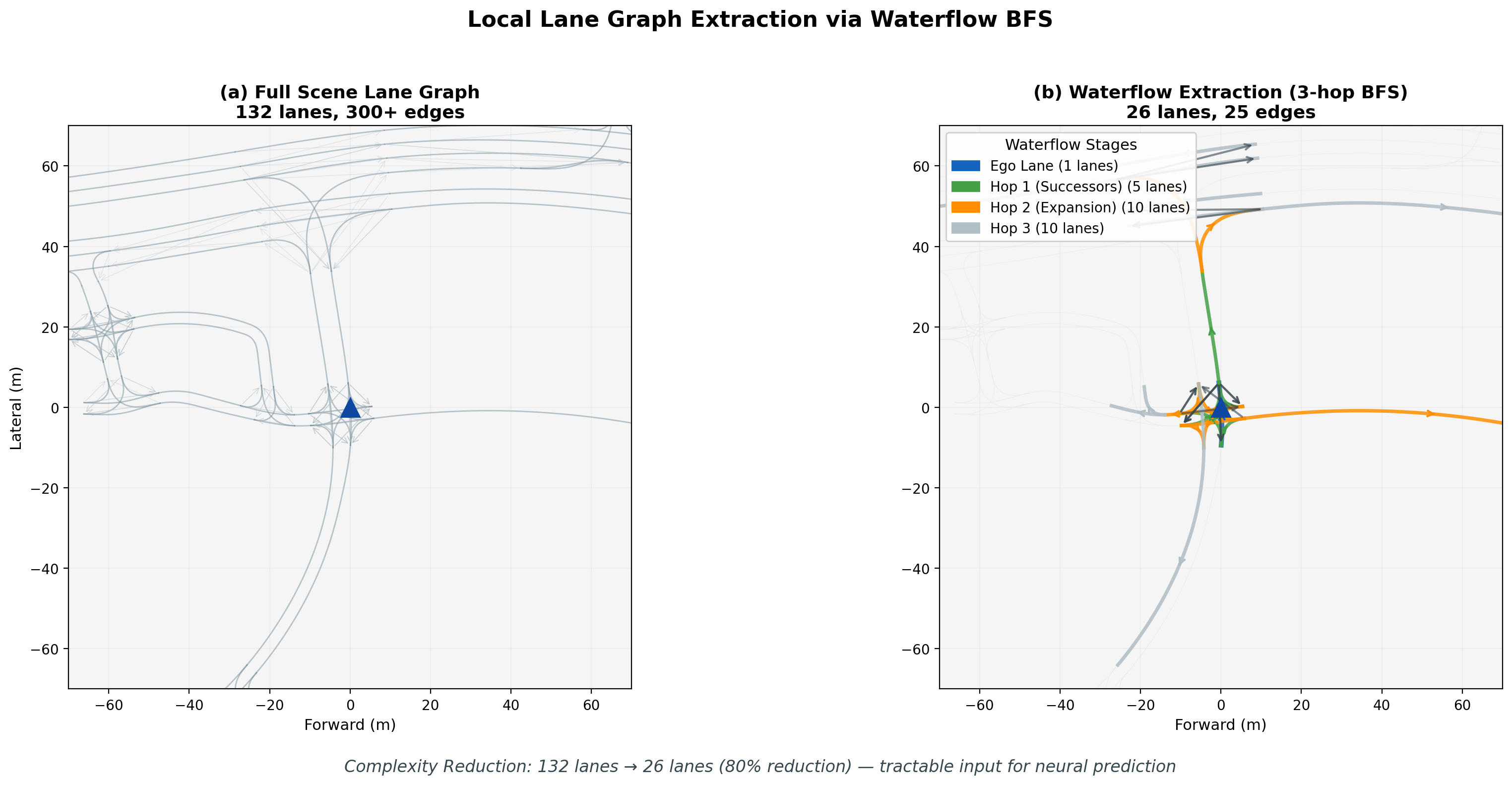
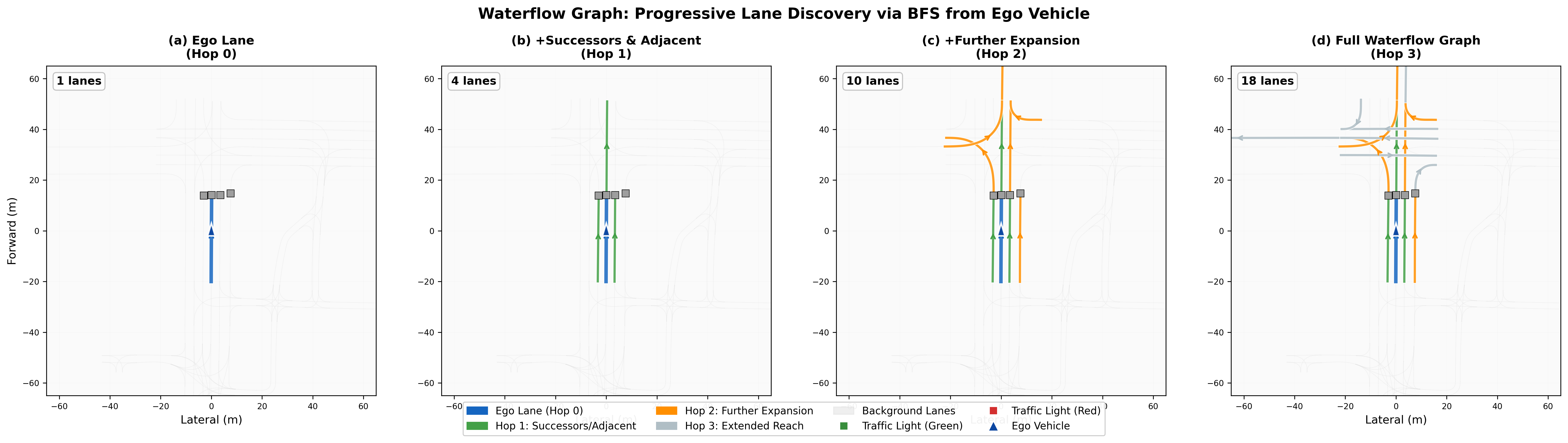
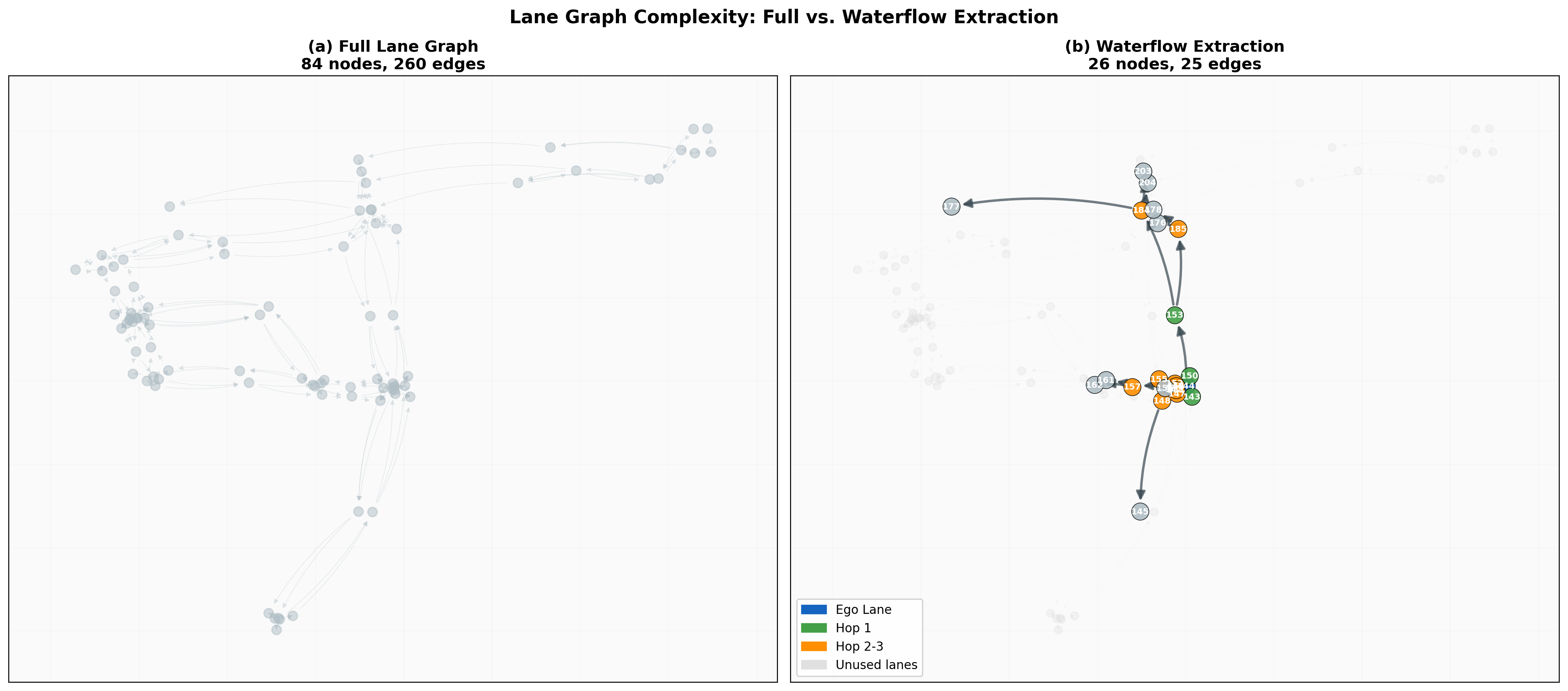
We present a structure-aware trajectory prediction framework that explicitly conditions on local lane graph structure. Our approach introduces a "waterflow" algorithm that extracts a local lane graph via 3-hop breadth-first search from the ego vehicle's current lane, reducing graph size by 80% while preserving critical connectivity information. The extracted lane graph is encoded using graph message passing and fused with trajectory features via cross-attention.
Evaluated on 89,258 signal-controlled intersection scenarios from the Waymo Open Motion Dataset (filtered from 123K processed scenarios, approximately 25% of the 487K WOMD v1.1 training partition), our approach achieves up to 26.7% minADE improvement and 42.7% miss rate reduction in multi-modal prediction. The method is architecture-agnostic, demonstrating consistent gains on both LSTM (+18.7%) and Transformer (+32.0%) backbones. Error decomposition reveals balanced improvements across both longitudinal (+25.4%) and lateral (+26.5%) components, with endpoint lateral error showing the strongest reduction (+30.5%).
(8s, K=6 multi-modal)
(MR@5m: 34.0% → 19.3%)
(~8% overhead for LSTM)
LSTM and Transformer
official full-feature LSTM
- Waterflow Local Lane Graph Extraction: Novel 3-hop BFS algorithm that identifies relevant road structure from the ego lane, achieving 80% graph size reduction while preserving connectivity
- Architecture-Agnostic Lane Conditioning: A graph-based lane encoding module with cross-attention fusion that integrates seamlessly into both LSTM and Transformer prediction backbones
- Comprehensive Evaluation: Large-scale experiments on 89K Waymo intersection scenes with multi-modal prediction, error decomposition, and cross-architecture validation
- Implicit Regularization Effect: We show that lane conditioning acts as an implicit regularizer for Transformer encoders, preventing the overfitting observed in unconditioned models
Multi-Modal Prediction Demos
Side-by-side animated comparison of LSTM Baseline (left half) vs LSTM + Lane Conditioning (right half) on ego-centric bird's-eye view. Each demo shows K=6 multi-modal trajectory predictions growing step-by-step over the 8-second horizon. The lane-conditioned model produces tighter, more lane-aligned trajectories.
Straight-through at intersection
BL: 4.35m → LC: 1.19m (+73%)
Left turn at complex intersection
BL: 8.95m → LC: 3.09m (+65%)
Left turn with lane following
BL: 3.64m → LC: 1.38m (+62%)
Straight-through with neighbors
BL: 1.33m → LC: 0.54m (+59%)
Curved lane following
BL: 1.89m → LC: 0.83m (+56%)
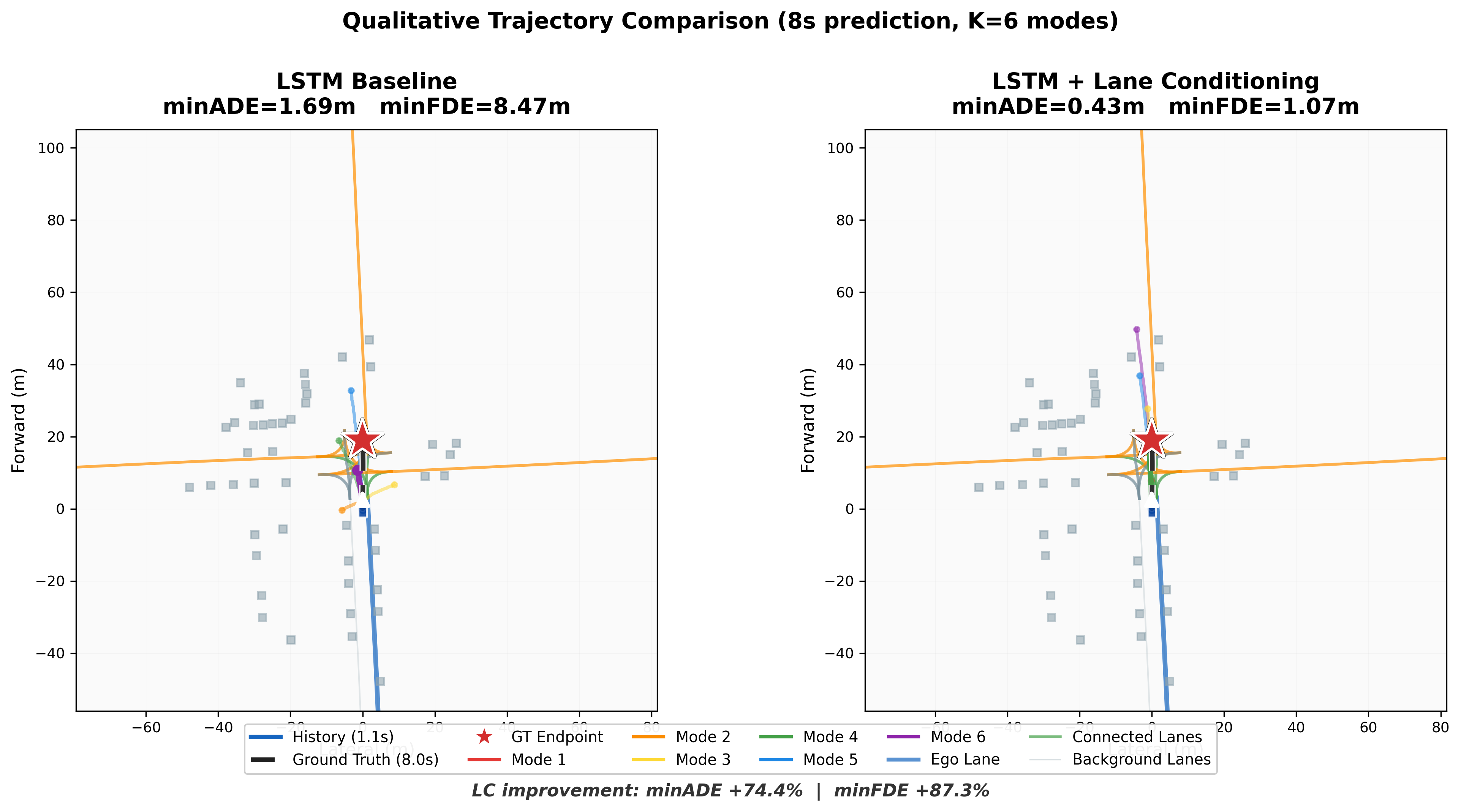
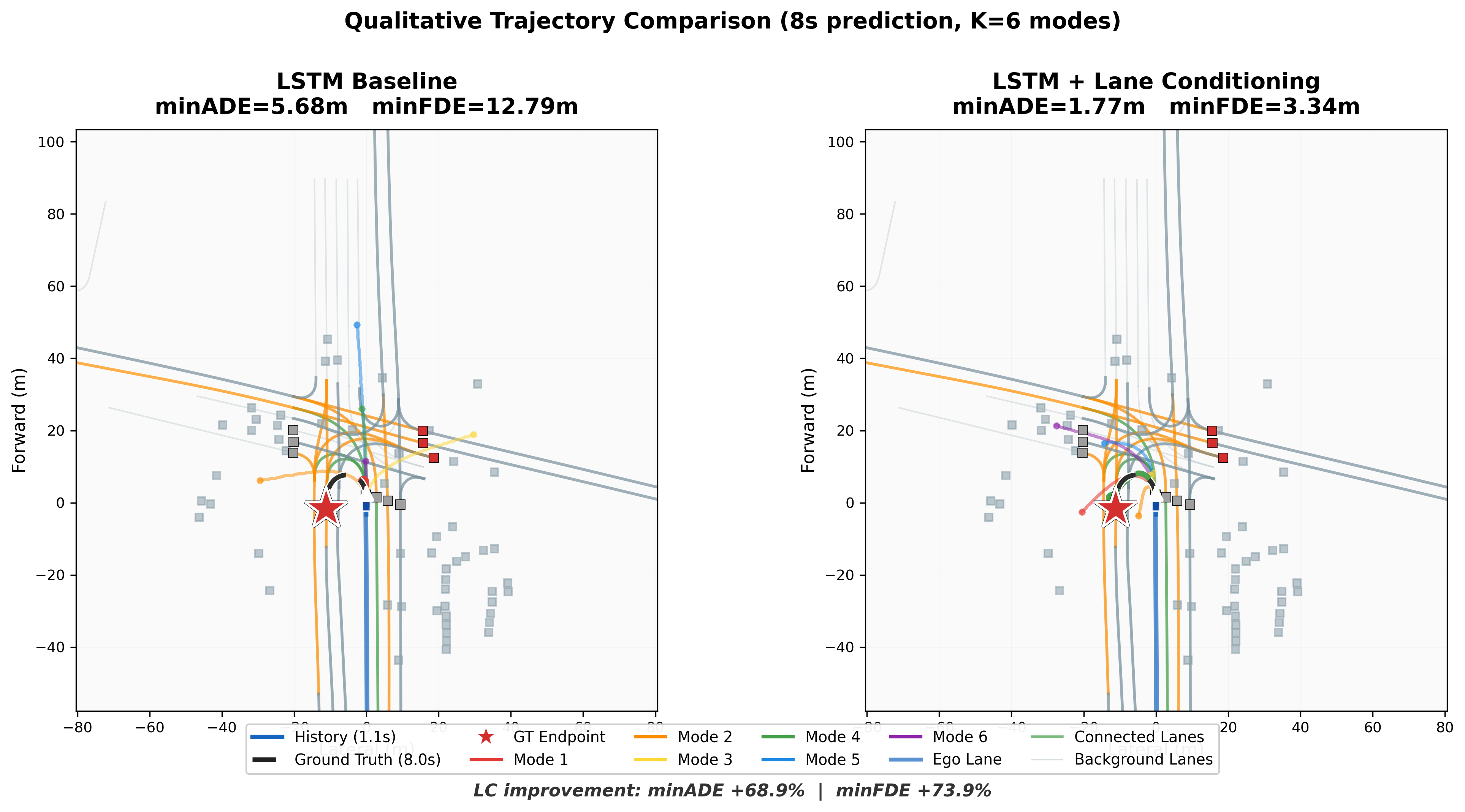
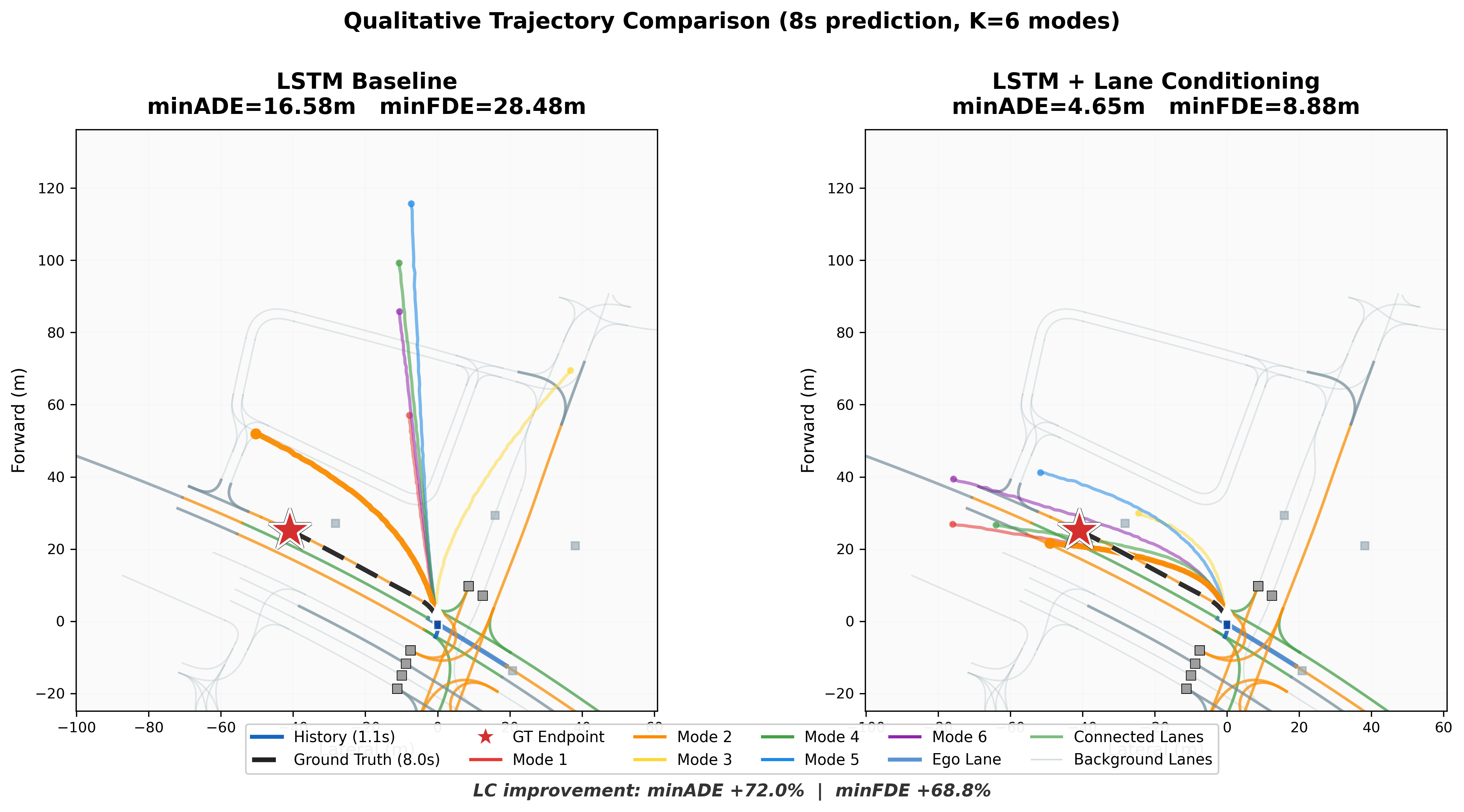
Qualitative Trajectory Comparison
Static snapshots comparing all K=6 prediction modes between the baseline and lane-conditioned models. The lane-conditioned model's trajectories follow connected lane structure (shown in green/orange), while the baseline produces scattered, off-road predictions.
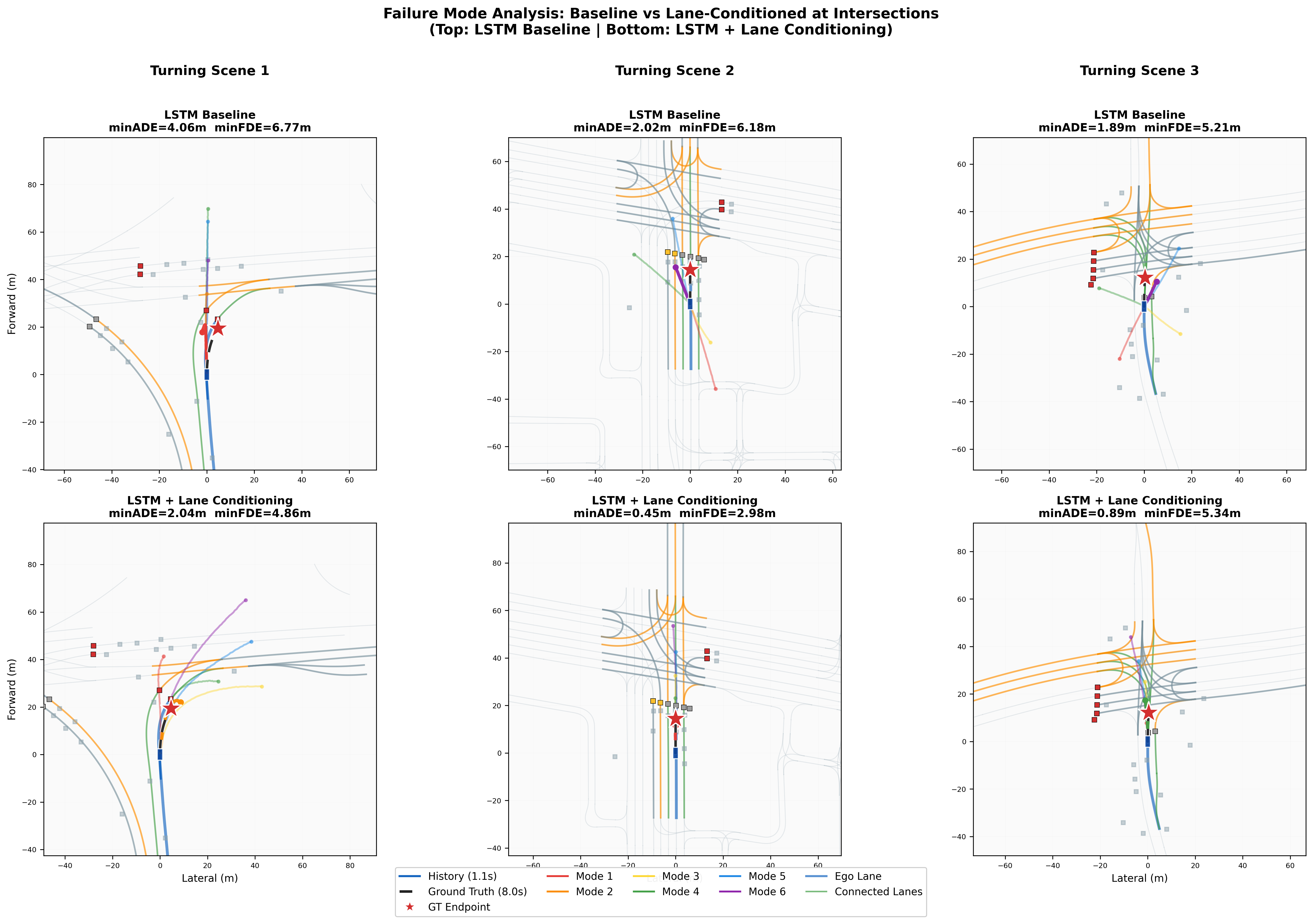
Failure Mode Analysis: Turning at Intersections
The lane-conditioned model shows its greatest advantage during turning maneuvers, where the baseline lacks structural guidance and produces scattered, off-road predictions. These 3 examples show scenes with high ego curvature where BL error is significantly worse than LC.
Rolling Prediction Through Full Scenario
These visualizations sweep the anchor frame through the full 9.1-second scenario, generating a new K=6 multi-modal prediction at each timestep. This shows how predictions evolve as the ego vehicle progresses through the scene. The LC model maintains accurate predictions throughout the entire drive, while the baseline's errors compound over time.
Straight-through (full scenario)
Avg minADE: BL 2.82m → LC 1.21m (+57%)
Turn maneuver (full scenario)
Avg minADE: BL 3.70m → LC 1.66m (+55%)
Straight with lane guidance
Avg minADE: BL 1.03m → LC 0.59m (+43%)
Experimental Results
We evaluate on 89,258 signal-controlled intersection scenarios selected from the Waymo Open Motion Dataset (WOMD v1.1) training partition. These scenes were filtered from 123K processed scenarios (~25% of WOMD's 487K total training scenarios) to focus on urban intersections with traffic lights, where lane conditioning provides the greatest benefit. We use a custom 85/15 train/val split. All models share the same data pipeline: 1.1s history (11 steps at 10Hz), neighbor encoding, and CV-residual prediction. The lane-conditioned (LC) models additionally receive the local lane graph extracted by the waterflow algorithm.
Short-Horizon Single-Modal Prediction (3s)
To establish statistical significance, we train 3 seeds for 3-second prediction and report mean and standard deviation.
| Model | ADE@3s (mean ± std) | Improvement |
|---|---|---|
| LSTM Baseline (BL) | 0.559 ± 0.007 | — |
| LSTM Lane-Cond (LC) | 0.507 ± 0.011 | +9.3% |
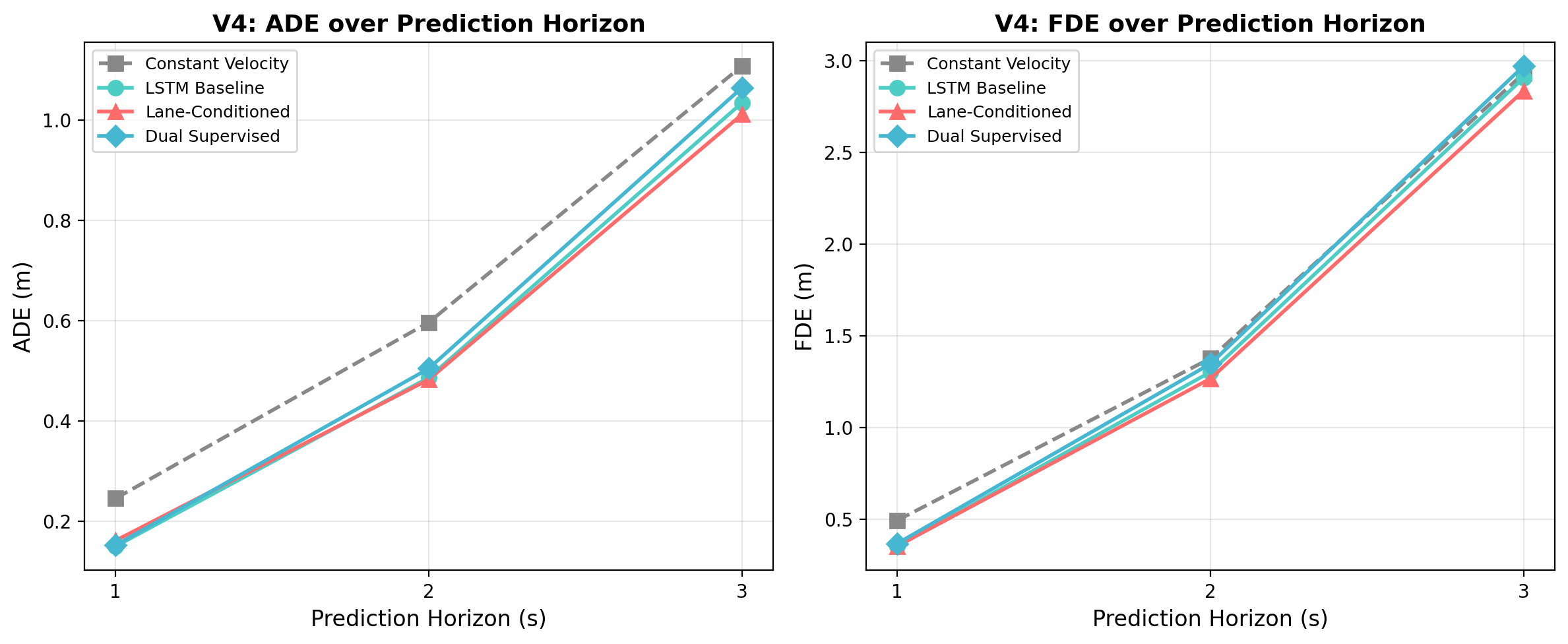
Long-Horizon Single-Modal Prediction (8s)
We extend the prediction horizon to 8 seconds (80 timesteps) and test both LSTM and Transformer backbones. Lane conditioning provides large improvements on both architectures, with Transformer benefiting even more (+32.0% ADE).
| Model | ADE@8s | FDE@8s | ADE@3s | vs Baseline |
|---|---|---|---|---|
| LSTM-BL | 3.781 | 11.244 | 0.553 | — |
| LSTM-LC | 3.075 | 8.688 | 0.516 | +18.7% |
| TF-BL | 4.859 | 13.875 | 0.828 | — |
| TF-LC | 3.303 | 8.956 | 0.663 | +32.0% |
Multi-Modal Prediction (8s, K=6)
For multi-modal prediction, each model generates K=6 trajectory hypotheses per agent. We use the winner-takes-all (WTA) training strategy and report min-of-6 metrics.
| Model | minADE | minFDE | MR@5m | vs Baseline |
|---|---|---|---|---|
| LSTM-BL | 1.868 ± 0.042 | 5.047 ± 0.106 | 34.0 ± 1.3% | — |
| LSTM-LC | 1.371 ± 0.081 | 3.403 ± 0.242 | 19.3 ± 0.7% | +26.7% / +32.6% / +42.7% |
Context: Comparison with Waymo Official Baselines
While not a direct apples-to-apples comparison (different features, evaluation splits), the Waymo Motion Prediction Challenge provides useful context for our results.
| Model | Features | minADE (m) |
|---|---|---|
| Waymo LSTM (bare)† | Agent state (pos, vel, bbox) | 2.63 |
| Our LSTM-BL | Position + Neighbor | 1.87 |
| Waymo LSTM + rg + ts + hi† | Agent state + map + signals + interactions | 1.34 |
| Our LSTM-LC | Position + Neighbor + Lane | 1.37 ± 0.08 |
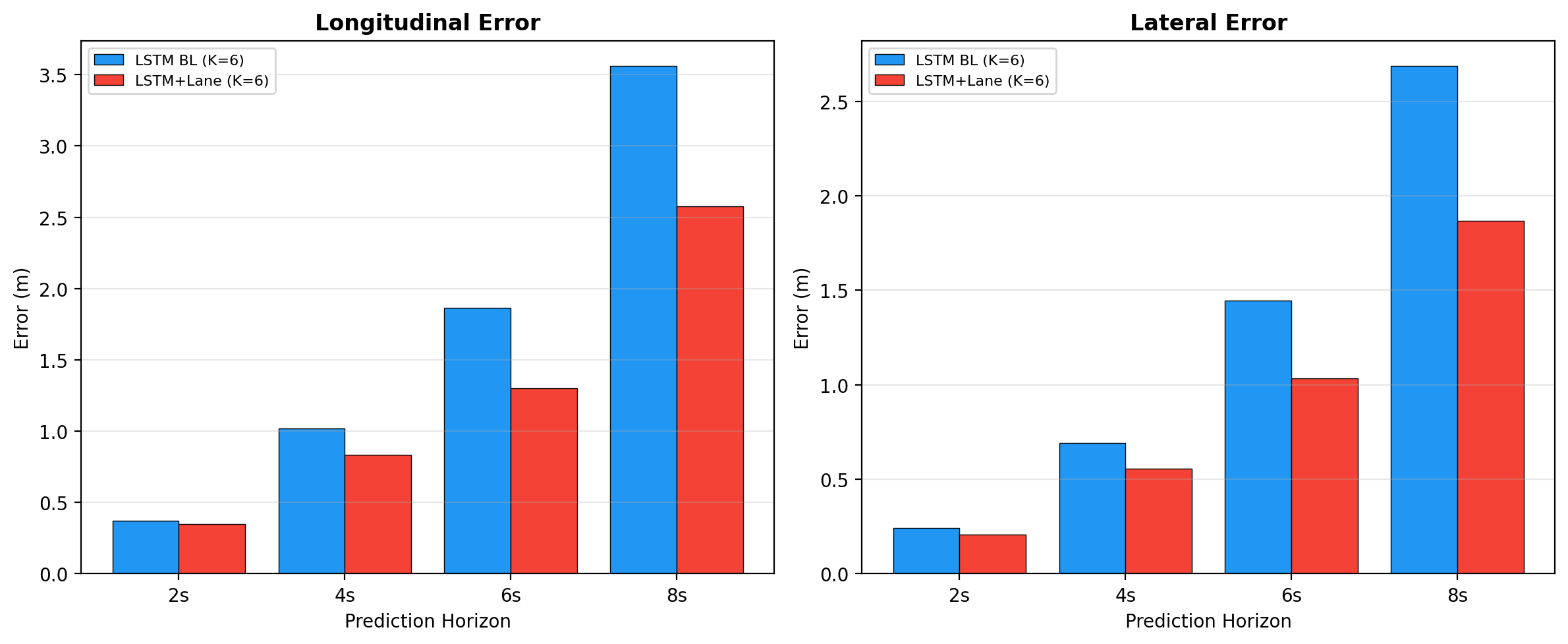
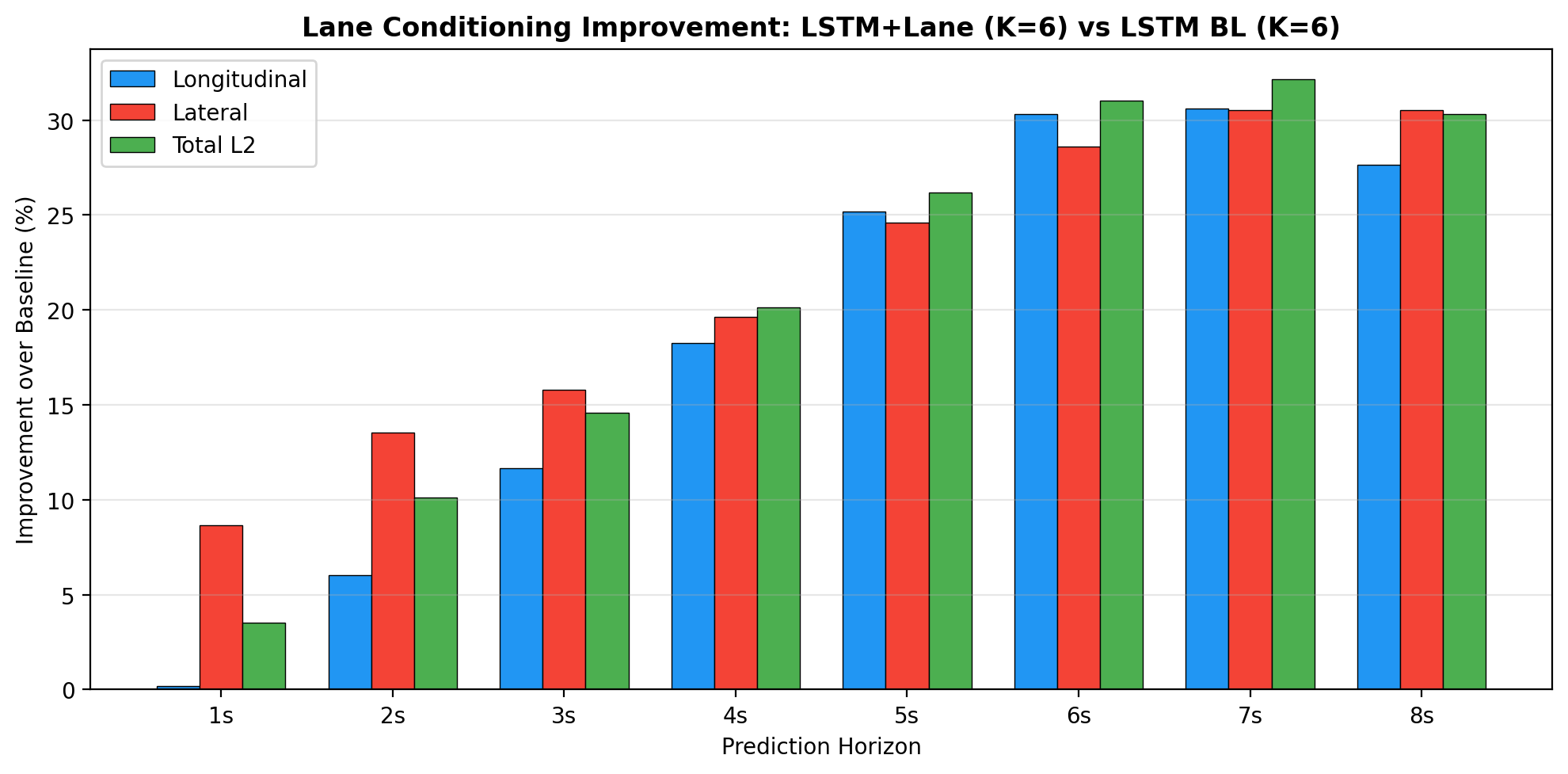
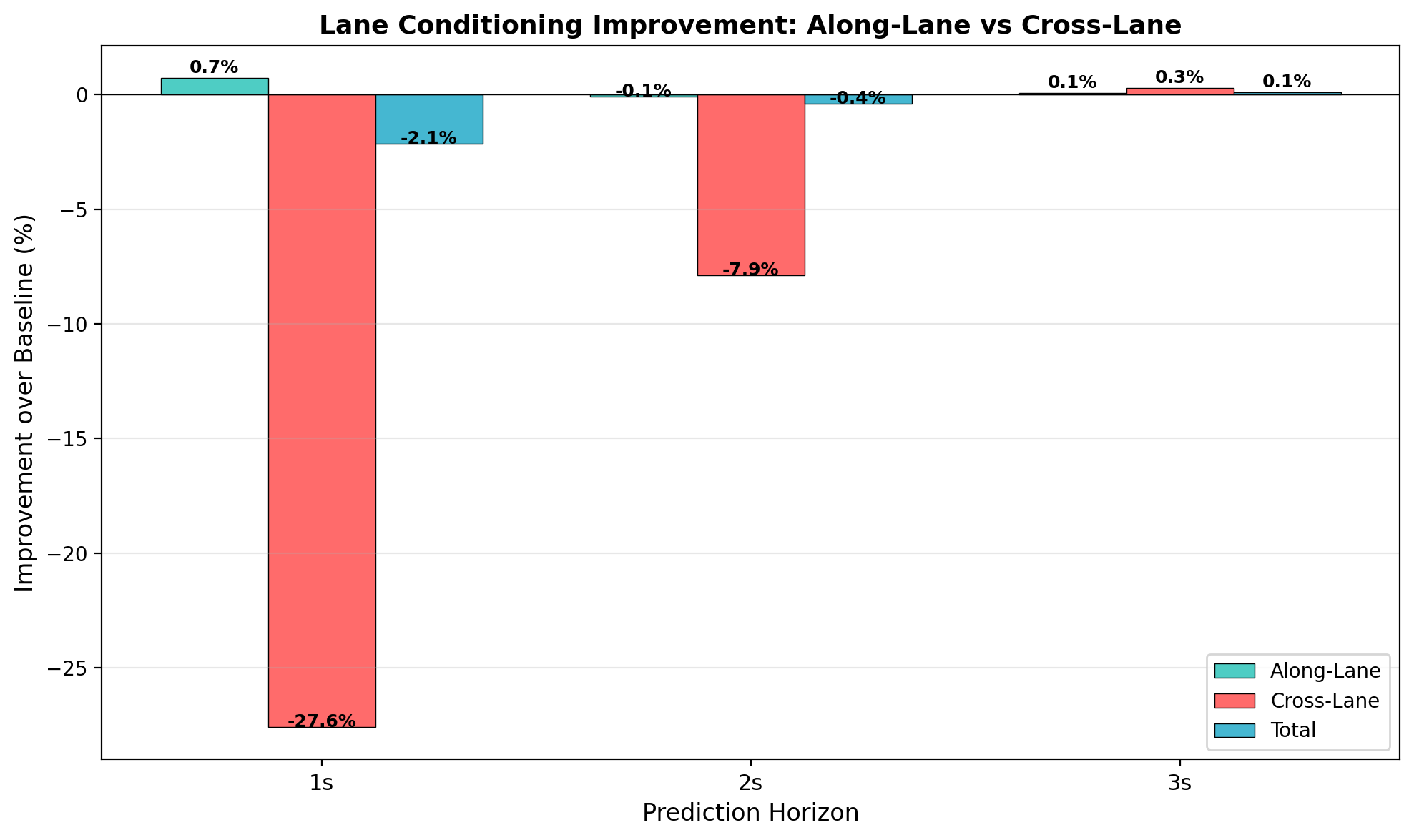
Error Decomposition Analysis
To understand where lane conditioning provides its benefits, we decompose prediction error into longitudinal (along-lane direction) and lateral (cross-lane direction) components for both average and endpoint errors.
| Component | Baseline (m) | Lane-Cond (m) | Improvement |
|---|---|---|---|
| Average Longitudinal | 1.238 | 0.924 | +25.4% |
| Average Lateral | 0.919 | 0.675 | +26.5% |
| Endpoint Longitudinal | 3.561 | 2.577 | +27.6% |
| Endpoint Lateral | 2.687 | 1.867 | +30.5% |
Method Overview
Our framework adds a lane conditioning module to a standard trajectory prediction pipeline. The key design principle is architecture-agnostic fusion: the lane encoder communicates with the trajectory encoder through cross-attention, making it compatible with any backbone.
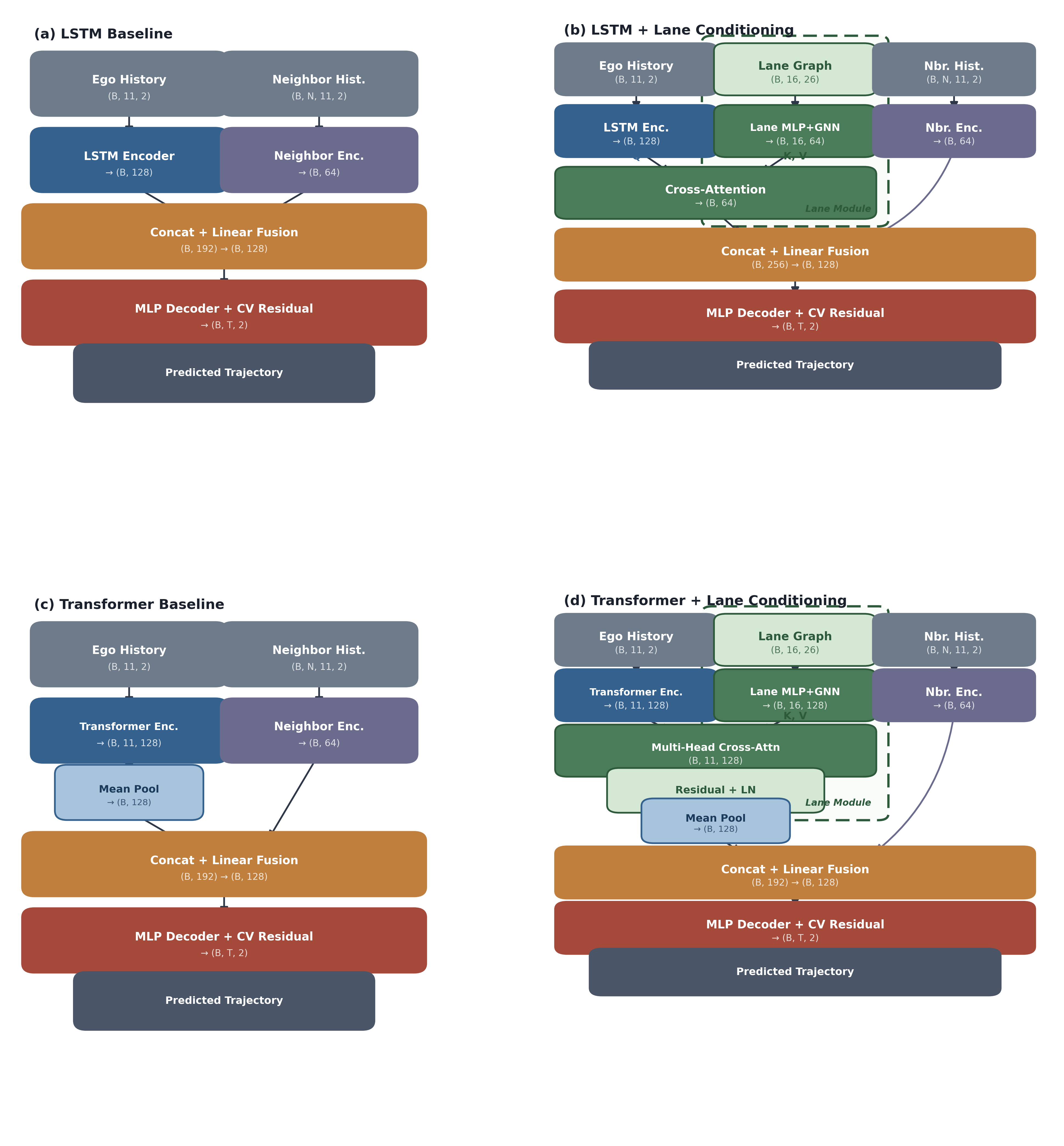
1. Trajectory Encoder (LSTM / Transformer)
Encodes the observed trajectory history (1.1 seconds, 11 timesteps at 10Hz). LSTM variant: compresses history into a single hidden vector (B, 128). Transformer variant: 2-layer, 4-head self-attention with learnable positional embeddings.
2. Lane Graph Encoder (MLP + Message Passing + Cross-Attention)
Lane Feature Extraction: Each lane segment is encoded using an MLP that processes polyline points, traffic light states, and lane types.
Graph Message Passing: 2 rounds of message passing propagate information through lane connectivity (predecessors, successors, left/right neighbors).
Cross-Attention Fusion: Lane embeddings attend to trajectory features to select the most relevant structural context for the current motion.
3. Neighbor Encoder (LSTM + Max-Pool)
Encodes surrounding vehicles' trajectories using per-neighbor LSTMs, then aggregates via max-pooling to create a permutation-invariant neighbor representation.
4. Fusion + MLP Decoder with CV-Residual Prediction
Fuses trajectory, lane, and neighbor embeddings through concatenation followed by MLP layers. The decoder predicts residuals relative to a constant velocity baseline. For multi-modal prediction, K=6 heads generate diverse trajectory hypotheses trained with winner-takes-all loss.
Waterflow Local Lane Graph Extraction
A key challenge in lane-conditioned prediction is managing the complexity of full road graphs. Real-world intersections can contain dozens of lane segments, most of which are irrelevant to the ego vehicle's near-future trajectory.
Key Findings
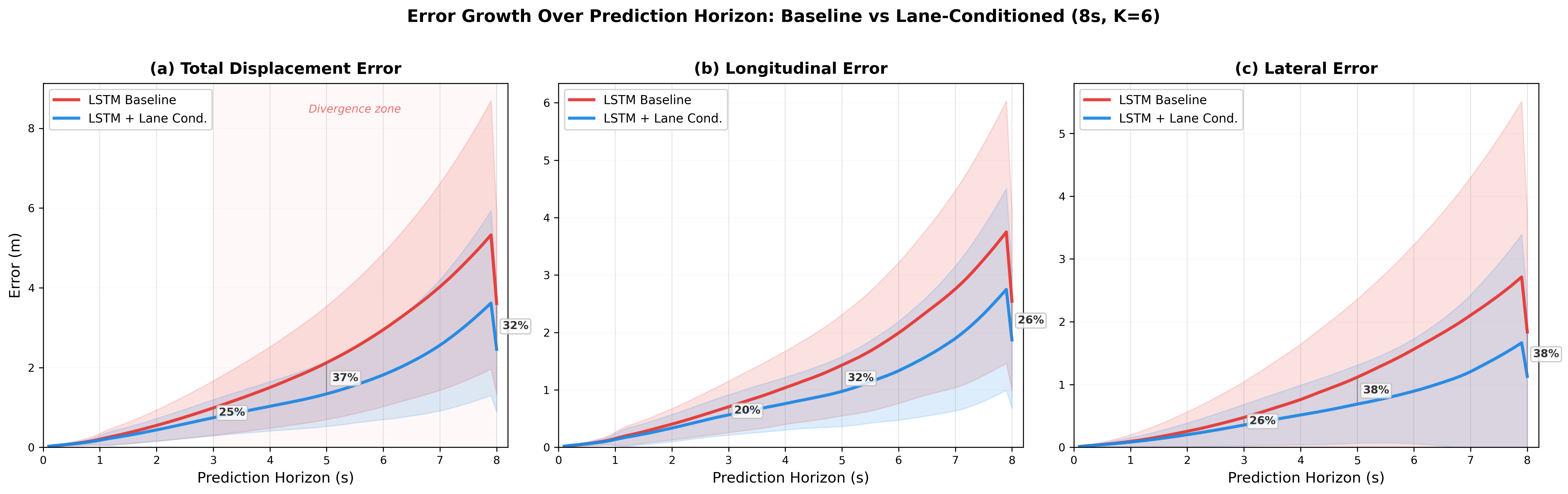
1. Benefit Increases with Prediction Horizon
Lane conditioning becomes increasingly valuable as the prediction horizon grows. At 3 seconds, constant-velocity extrapolation is a reasonable approximation. At 8 seconds, vehicles may change lanes, turn at intersections, or follow curved roads.
| Horizon | Setting | Improvement (ADE) |
|---|---|---|
| 3s | Single-modal, LSTM | +9.3% |
| 8s | Single-modal, LSTM | +18.7% |
| 8s | Multi-modal K=6, LSTM | +26.7% |
2. Architecture-Agnostic: LSTM and Transformer
Both LSTM and Transformer encoders benefit substantially, with Transformer showing an even larger relative gain (+32.0% vs +18.7%). Lane conditioning acts as an implicit regularizer for the Transformer — TF-BL overfits severely (ADE 4.859), while TF-LC achieves ADE 3.303.
3. Balanced Error Reduction
Error decomposition reveals improvements in both longitudinal and lateral prediction. The strongest gain is on endpoint lateral error (+30.5%).
4. Delayed Convergence, Lower Asymptote
The lane-conditioned model converges more slowly than the baseline (optimum around epoch 94 vs epoch 23 for baseline). Short training runs can be misleading — 100 epochs is essential to observe the full benefit.
5. Numerically Comparable to Waymo Official
Our LC-LSTM achieves minADE = 1.37 ± 0.08m using only position + lane features, comparable to the Waymo official LSTM baseline (1.34m) that uses the full feature set (velocity, heading, object type, etc.).
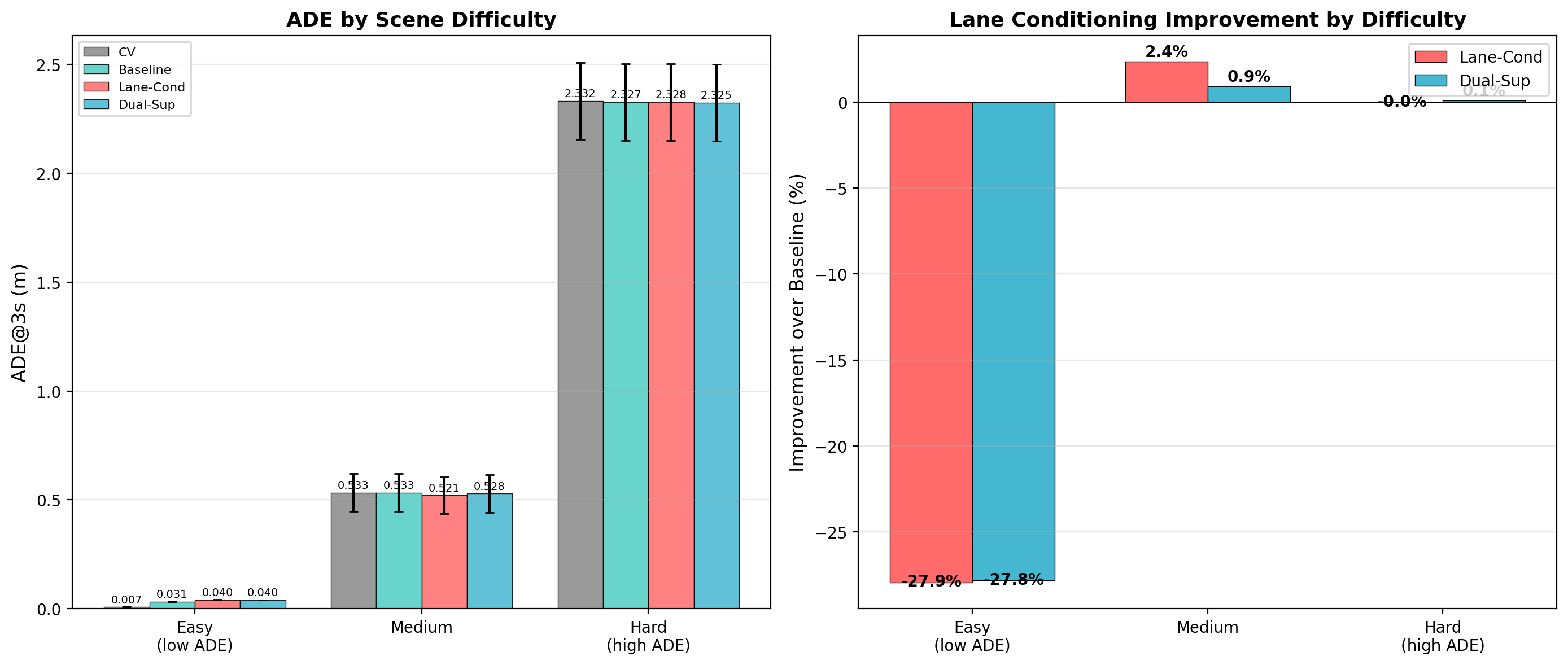
Additional Analysis
Scene Difficulty Analysis
Dataset
We use the Waymo Open Motion Dataset (WOMD) v1.1 training partition, which contains approximately 487,000 total training scenarios. Our processing pipeline extracts ego vehicle trajectories from each scenario:
Processing Pipeline
Step 1: Extract ~123K scenarios from WOMD training set (~25% of total) and process raw protobuf data into per-scene trajectory and lane graph files.
Step 2: Filter for signal-controlled intersection scenarios, yielding 89,258 scenes with traffic lights. These intersections have the richest lane structure and are where lane conditioning provides the greatest benefit.
Step 3: Split into 85% training / 15% validation using a fixed random seed for reproducibility.
Data Format
Each scene spans 9.1 seconds at 10Hz (91 frames). We use 1.1s (11 frames) as history and predict the remaining 8.0s (80 frames) for multi-modal evaluation, or 3.0s (30 frames) for short-horizon evaluation. All positions are in ego-centric BEV coordinates with forward = up.